

-
I have two devices, astra and Astra Stereo S U3
Astra Stereo S U3 can detect video devices ls / dev /,but Astra cannot
So I can’t use cv2.VideoCapture(0) to open camera streaming Color image
Error:
VIDEOIO ERROR: V4L: can’t open camera by index 0
-
If I use Astra Stereo S U3 and openni
Error:
raise OpenNIError(res, msg.strip(), logfile)
openni.utils.OpenNIError: (OniStatus.ONI_STATUS_ERROR, ‘’, None) -
Is it possible to stream color and depth images at same time using openni in Python?
If using astra and openni I can already get color and depth frames and depth stream
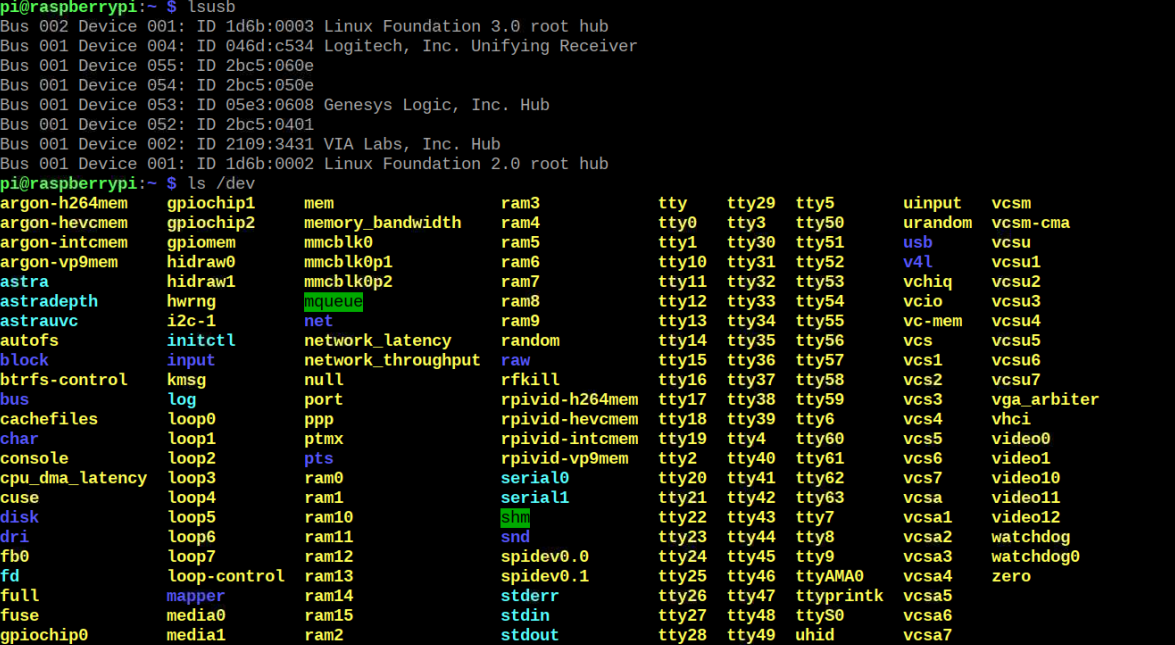
Run the following command and notice the cameras and indices:
v4l2-ctl --list-devices
Using Python, OpenNi2 and OpenCV you can stream color and depth simultaneously from Astra Stereo S.
At the moment I find some problem in synchronizing depth and color stream. I don’t know how to synchronize depth frame capture using OpneNi and RGB frame captured using OpenCV.