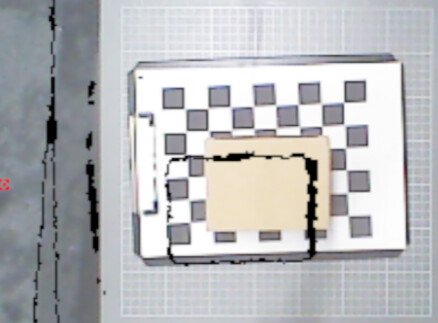
without depth registration
[not able to put >1 image in a post, will link later]
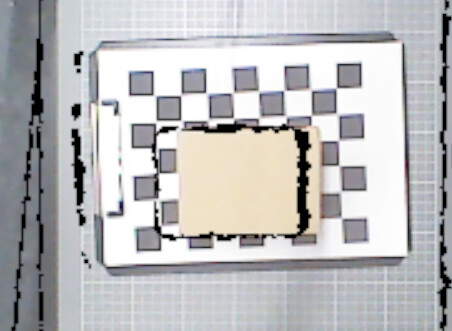
with depth registration
[not able to put >1 image in a post, will link later]
I have tried to change tf frames and played with extrinsic parameters too, but the images do not seem to align whatever I do. What seems to be the problem and what can I explore to solve it?
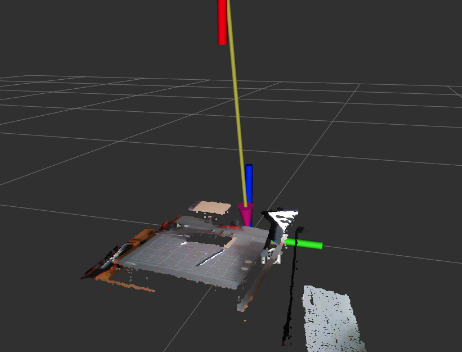
Even a multiple camera setup seems to perform worse
[not able to put >1 image in a post, will link later]
Are there any packages that I can use to align the images? I need the rgb and depth to be aligned because I am using cv (yolov8) to relate a detected point in the image to the depth frame - currently, I have completed the yolov8 part but I need to fix this for the cv part to be accurate.
I am currently using ros-noetic on ubuntu 20.04 and astra camera. I have access to astra pro and astra s u3 as well, but for now the drivers do not seem to allow rgb and depth streams together so for simplicity I am just using astra.