

Hello all.
I’ve been working for the past year with the Orbbec Astra and in my job I have to compute angles from certain joints. I came a across a problem where I believe that the body tracking is not working properly and wanted to know if anyone has had this problem.
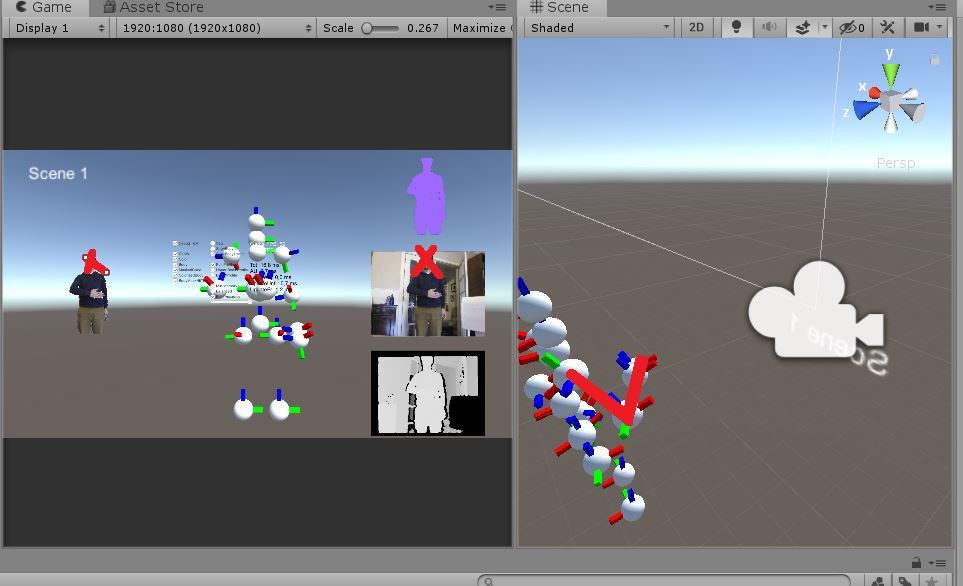
The angle I’m trying to calculate the angle from the elbow to the hand when you do an internal rotation movement (you can kinda see from the image but basically its where you have your arm down, lift your forearm 90º up and then move your hand towards your chest).
In the image that I show, on the left side, my hand makes a 90º angle with the forearm (my hand is perpendicular to where I’m facing) and the skeleton produced by the SDK is not representing the movement right. It is at about 70º-60º at most.
The thing is, if I do the same movement but rotate to the other side, external rotation, the joints are well captured. My guess is that the hand goes in front of some other joints in the body and that may be messing with the algorithm.
It is imperative for me to have the right angles with the best precision I can so I wanted to know if any of you ever came across with something like this.