

I bought an Astra S camera. Its specification states the following - Data Output: Point Cloud, Depth Map, IR or RGB.
I installed the OrbbecSDK and am following the instructions from README.
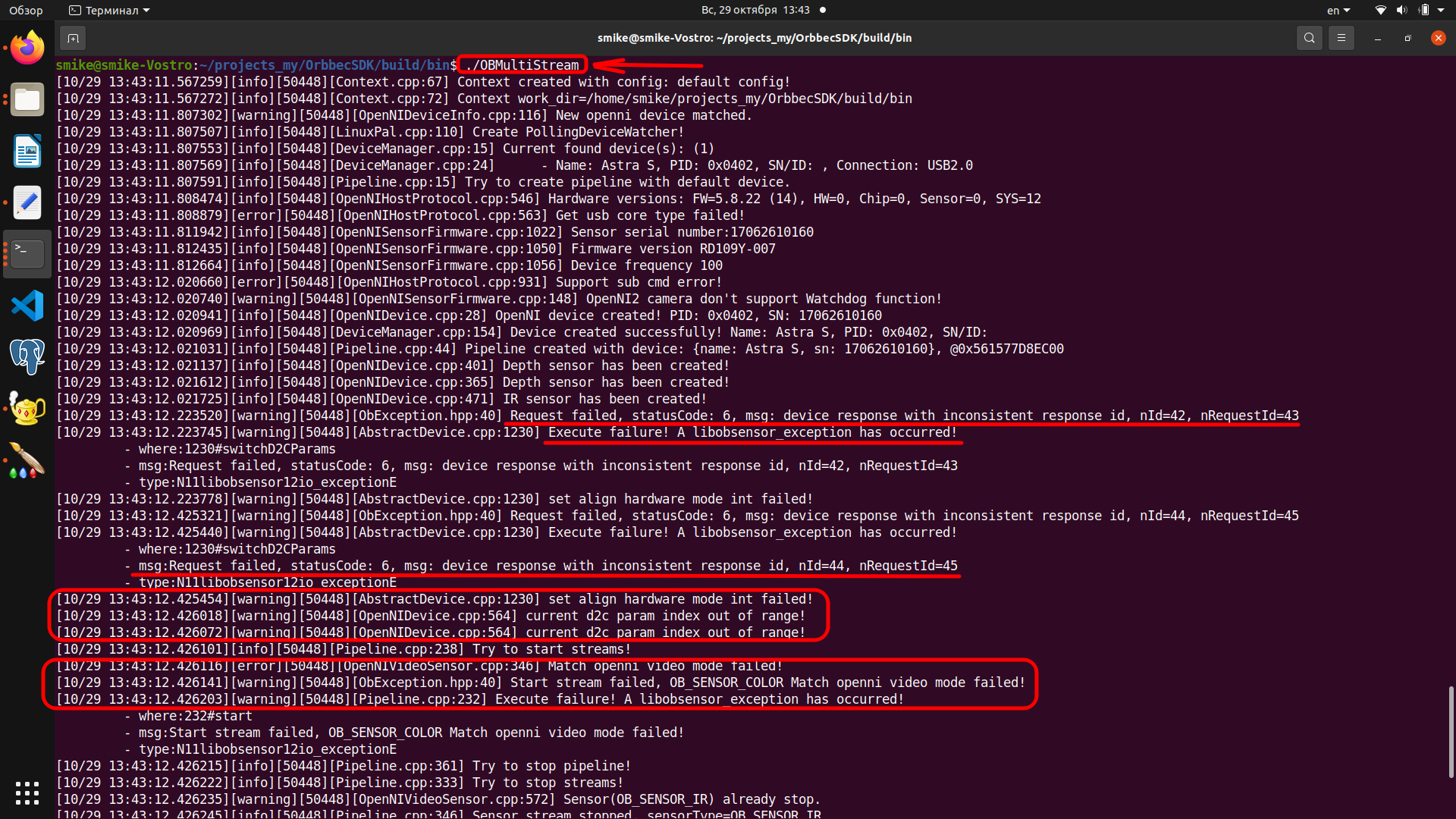
When I try to launch test applications (OBMultiStream) from OrbbecSDK/build/bin, the following errors occur:
OBHelloOrbbec output:
SDK version: 1.8.1
Device name: Astra S
Device pid: 1026 vid: 11205 uid: 1-3-10
Firmware version: RD109Y-007
Serial number: 17062610160
ConnectionType: USB2.0
Sensor types:
IR sensor
Color sensor
Depth sensor
OBInfraredViewer output:
[10/29 13:30:57.809712][info][48844][OpenNIDevice.cpp:471] IR sensor has been created!
[10/29 13:30:57.809791][warning][48844][ObException.cpp:5] Invalid input, No matched video stream profile found!
[10/29 13:30:57.809973][info][48844][Pipeline.cpp:238] Try to start streams!
[10/29 13:30:57.817461][info][48844][Pipeline.cpp:251] Start streams done!
[10/29 13:30:57.817484][info][48844][Pipeline.cpp:234] Pipeline start done!
but I only see a black window…
OBPointCloud output:
[10/29 13:36:21.442965][error][49539][OpenNIVideoSensor.cpp:346] Match openni video mode failed!
[10/29 13:36:21.442997][warning][49539][ObException.hpp:40] Start stream failed, OB_SENSOR_COLOR Match openni video mode failed!
[10/29 13:36:21.443117][warning][49539][Pipeline.cpp:232] Execute failure! A libobsensor_exception has occurred!
- where:232#start
- msg:Start stream failed, OB_SENSOR_COLOR Match openni video mode failed!
- type:N11libobsensor12io_exceptionE
[10/29 13:36:21.443134][warning][49539][OpenNIVideoSensor.cpp:572] Sensor(OB_SENSOR_COLOR) already stop.
function:start
args:config
message:Start stream failed, OB_SENSOR_COLOR Match openni video mode failed!
type:6
Only OBDepthViewer works normally.
What can be wrong?