Hello Orbbec community,
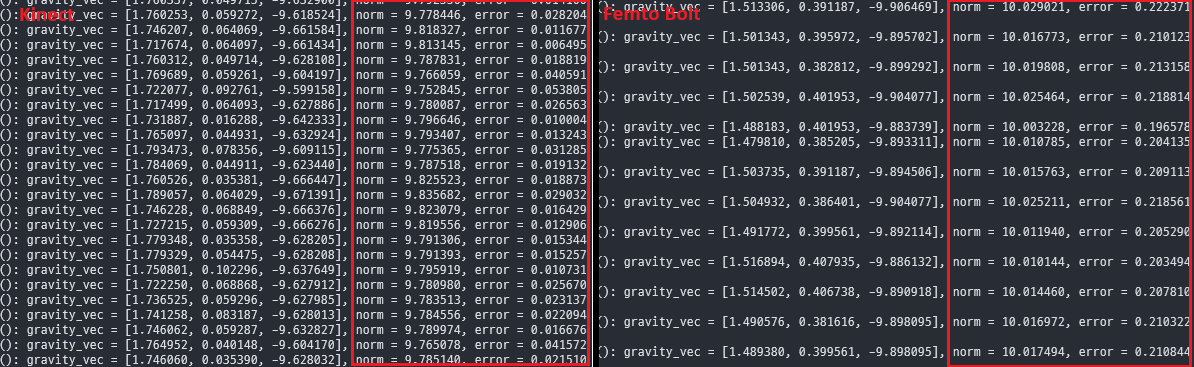
I am currently working with an Orbbec Femto Bolt and using the onboard IMU (gyro and accelerometer) to estimate the position and orientation of the camera. However, I have encountered significant noise in the IMU data, particularly in both the accelerometer and gyroscope readings.
Here are some details about the setup:
- I am sampling IMU data at a rate of approximately 100Hz.
- The noise is especially noticeable when the device is stationary, where small fluctuations in the readings still occur.
- I am using a basic sensor fusion algorithm (e.g., Kalman filter) to estimate the position and orientation, but the noise leads to noticeable drift over time.
Could anyone provide recommendations on how to mitigate the noise in IMU data? Are there any specific filtering techniques, calibration methods, or configurations that can help reduce the impact of noise on the data?
Any insights or advice would be greatly appreciated!
Best regards,