

Dear All,
I think the factory calibration of my camera is not good.
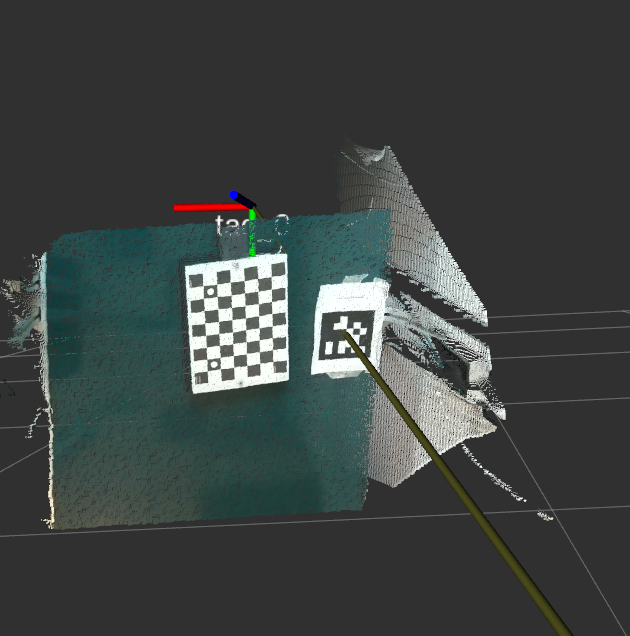
When I try to detect an Apriltag, I expect the frame tag_0 to be aligned with the pointcloud. Instead it is not as you can see. I then run the calibration with:
rosrun camera_calibration cameracalibrator.py --size 8x6 --square 0.040 image:=/orbbec/color/image_raw camera:=/orbbec/color
And I got this:
**** Calibrating ****
mono pinhole calibration...
D = [0.03607978415572378, -0.06995890624481552, -0.004712715329159888, -0.005262820128781143, 0.0]
K = [705.2896417407345, 0.0, 625.4166476513873, 0.0, 704.7389982089596, 326.2061397240923, 0.0, 0.0, 1.0]
R = [1.0, 0.0, 0.0, 0.0, 1.0, 0.0, 0.0, 0.0, 1.0]
P = [689.3284748558478, 0.0, 611.64888887399, 0.0, 0.0, 709.072952707366, 322.9635102203226, 0.0, 0.0, 0.0, 1.0, 0.0]
Which is quiet different from what I can read in orbbec/color/camera_info:
height: 720
width: 1280
distortion_model: "plumb_bob"
D: [0.07169410586357117, -0.09826862066984177, 0.03950003907084465, 0.0, 0.0]
K: [1502.9063720703125, 0.0, 1288.6431884765625, 0.0, 1502.4453125, 684.3364868164062, 0.0, 0.0, 1.0]
R: [1.0, 0.0, 0.0, 0.0, 1.0, 0.0, 0.0, 0.0, 1.0]
P: [1502.9063720703125, 0.0, 1288.6431884765625, 0.0, 0.0, 1502.4453125, 684.3364868164062, 0.0, 0.0, 0.0, 1.0, 0.0]
I tried to set the output fiel of the camera_calibration <arg name="color_info_uri" default="/home/iaslab/calibration_orbecc/calibrationdata/ost.yaml"/> in femto_mega.launch, but no effects are produces.
What should I do?