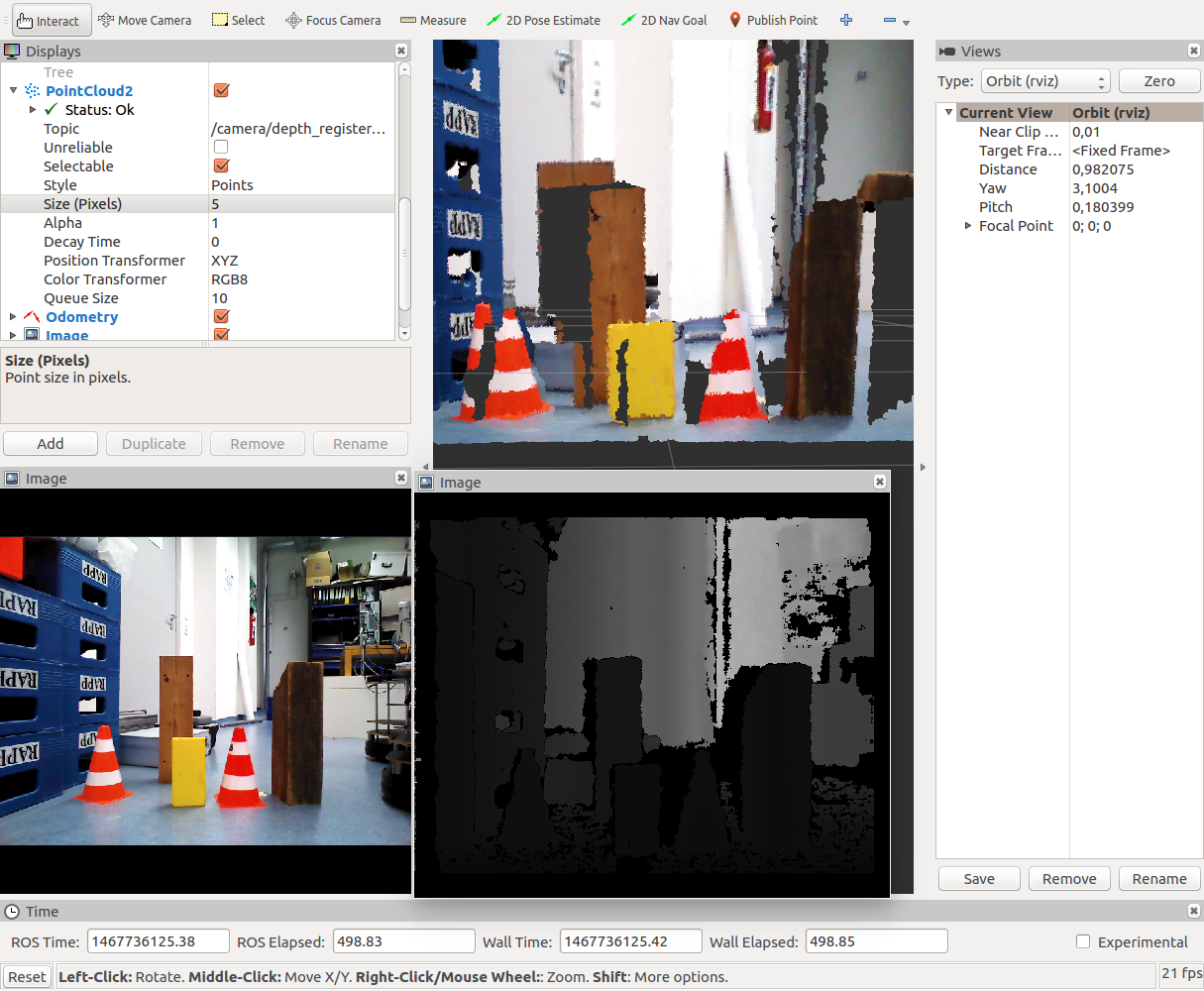
I think you can see waht I mean with bad Point registration.
the RGB Pic looks fine,
the depth also, but the pointcloud in rviz looks very strange, do you habe any idea ?
I have the same issue (running on windows) and also would like some insight. I found that even when registration is enabled (DepthStream.enable_registration(true)), there is still a noticeable offset, whether I’m getting the PointStream and ColorStream, or DepthStream and manually mapping that to the ColorStream. I’ve found in both cases applying a fixed x offset of 10 when going from the Point or Depth pixel to the color mostly corrects it, but it is still not a great registration.