

Hello All,
we are using the Astra Pro in an academic enviroment. We would like to mark points in the infrared images using reflective markers. Based on those markers we would like to select the corresponding image region in the depth image.
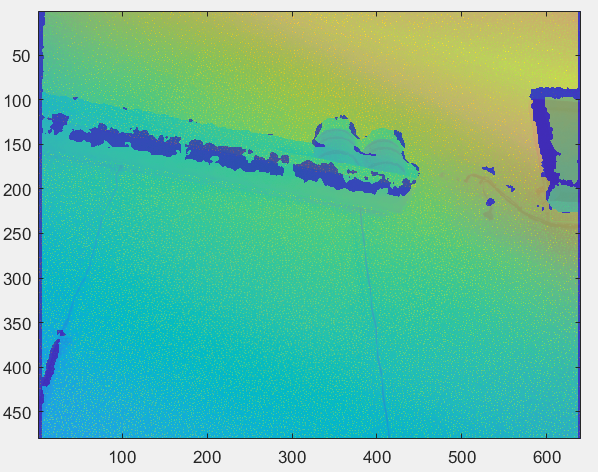
Right now we are using Python and OpenNI to capture both the infrared and depth stream in sequences of tiff images. We found on data inspection that there is an vertical offset between the infrared and depth image (cf. edge of the barrels on the sideboard in the example image)
I found the thread by AntoineW on image registration: Color to depth stream registrations, Astra Embedded S I tried to disable all registration between cameras in the D:\Program Files\OpenNI2\Redist\OpenNI2\Drivers\Orbbec.ini by setting Registration=0
The Resolution for IR and Depth-stream is resolution 640x480 (30FPS) just like in the python depthstream example: Examples — Orbbec Astra Wiki 2.0 documentation
My questions are: Is there some kind of registration happening between either depth and RGB or IR and RGB so that there is a mismatch between depth and IR? Can it be disabled in python, or the ini-File? Is there a constant depth independent offset between the IR- and Depthdata I can correct?
I would be nice if somebody could share some insights! Please ask if you need any more information
Thank you in advance and best regards,
ClaudiusN